When you’re working with binary data in Python—whether that’s image bytes, network payloads, or any in-memory binary stream—you often need a file-like interface without touching the disk. That’s where BytesIO from the built-in io module comes in handy. It lets you treat a bytes buffer as if it were a file.
What Is BytesIO?
Module:io
Class:BytesIO
Purpose:
Provides an in-memory binary stream.
Acts like a file opened in binary mode ('rb'/'wb'), but data lives in RAM rather than on disk.
Ideal for testing code that expects a file-like object.
Safety
No temporary files cluttering up your filesystem.
Integration
Libraries that accept file-like objects (e.g., PIL, requests) will work with BytesIO.
Basic Examples
1. Writing Bytes to a Buffer
from io import BytesIO
# Create a BytesIO buffer
buffer = BytesIO()
# Write some binary data
buffer.write(b'Hello, \xF0\x9F\x98\x8A') # includes a smiley emoji in UTF-8
# Retrieve the entire contents
data = buffer.getvalue()
print(data) # b'Hello, \xf0\x9f\x98\x8a'
print(data.decode('utf-8')) # Hello, 😊
# Always close when done
buffer.close()
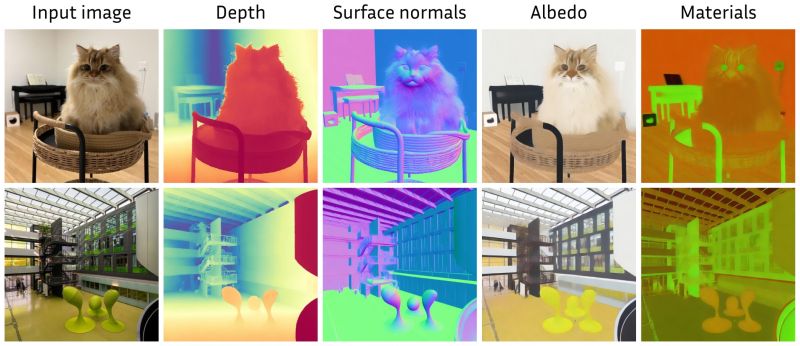
Marigold repurposes Stable Diffusion for dense prediction tasks such as monocular depth estimation and surface normal prediction, delivering a level of detail often missing even in top discriminative models.
Key aspects that make it great: – Reuses the original VAE and only lightly fine-tunes the denoising UNet – Trained on just tens of thousands of synthetic image–modality pairs – Runs on a single consumer GPU (e.g., RTX 4090) – Zero-shot generalization to real-world, in-the-wild images
Generate New Camera Angles Generate the Next Shot Use Any Style to Transfer to a Video Change Environments, Locations, Seasons and Time of Day Add Things to a Scene Remove Things from a Scene Change Objects in a Scene Apply the Motion of a Video to an Image Alter a Character’s Appearance Recolor Elements of a Scene Relight Shots Green Screen Any Object, Person or Situation
This demo is created for coders who are familiar with this awesome creative coding platform. You may quickly modify the code to work for video or to stipple your own Procssing drawings by turning them into PImage and run the simulation. This demo code also serves as a reference implementation of my article Blue noise sampling using an N-body simulation-based method. If you are interested in 2.5D, you may mod the code to achieve what I discussed in this artist friendly article.
🔹 Code Readability & Simplicity – Use meaningful names, write short functions, follow SRP, flatten logic, and remove dead code. → Clarity is a feature.
🔹 Function & Class Design – Limit parameters, favor pure functions, small classes, and composition over inheritance. → Structure drives scalability.
🔹 Testing & Maintainability – Write readable unit tests, avoid over-mocking, test edge cases, and refactor with confidence. → Test what matters.
🔹 Code Structure & Architecture – Organize by features, minimize global state, avoid god objects, and abstract smartly. → Architecture isn’t just backend.
🔹 Refactoring & Iteration – Apply the Boy Scout Rule, DRY, KISS, and YAGNI principles regularly. → Refactor like it’s part of development.
I ran Steamboat Willie (now public domain) through Flux Kontext to reimagine it as a 3D-style animated piece. Instead of going the polished route with something like W.A.N. 2.1 for full image-to-video generation, I leaned into the raw, handmade vibe that comes from converting each frame individually. It gave it a kind of stop-motion texture, imperfect, a bit wobbly, but full of character.
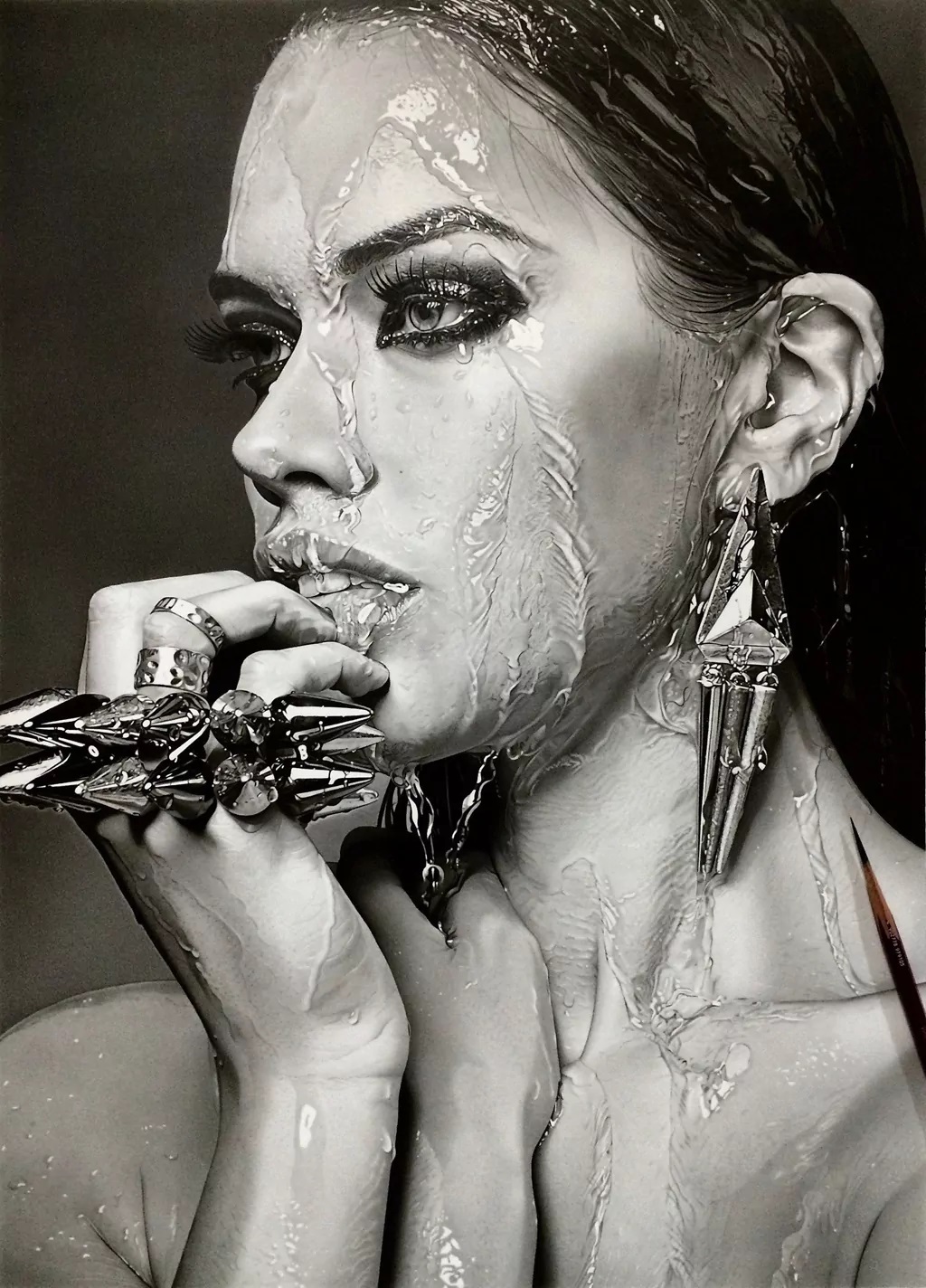
Our human-centric dense prediction model delivers high-quality, detailed (depth) results while achieving remarkable efficiency, running orders of magnitude faster than competing methods, with inference speeds as low as 21 milliseconds per frame (the large multi-task model on an NVIDIA A100). It reliably captures a wide range of human characteristics under diverse lighting conditions, preserving fine-grained details such as hair strands and subtle facial features. This demonstrates the model’s robustness and accuracy in complex, real-world scenarios.
The state of the art in human-centric computer vision achieves high accuracy and robustness across a diverse range of tasks. The most effective models in this domain have billions of parameters, thus requiring extremely large datasets, expensive training regimes, and compute-intensive inference. In this paper, we demonstrate that it is possible to train models on much smaller but high-fidelity synthetic datasets, with no loss in accuracy and higher efficiency. Using synthetic training data provides us with excellent levels of detail and perfect labels, while providing strong guarantees for data provenance, usage rights, and user consent. Procedural data synthesis also provides us with explicit control on data diversity, that we can use to address unfairness in the models we train. Extensive quantitative assessment on real input images demonstrates accuracy of our models on three dense prediction tasks: depth estimation, surface normal estimation, and soft foreground segmentation. Our models require only a fraction of the cost of training and inference when compared with foundational models of similar accuracy.
An exposure stop is a unit measurement of Exposure as such it provides a universal linear scale to measure the increase and decrease in light, exposed to the image sensor, due to changes in shutter speed, iso and f-stop.
+-1 stop is a doubling or halving of the amount of light let in when taking a photo
1 EV (exposure value) is just another way to say one stop of exposure change.
Same applies to shutter speed, iso and aperture.
Doubling or halving your shutter speed produces an increase or decrease of 1 stop of exposure.
Doubling or halving your iso speed produces an increase or decrease of 1 stop of exposure.